PG400 GYROSCOPE
Attitude Determination & Control System
Our flight proven high-performance standalone PG400 gyroscope designed for CubeSat and SmallSat offers an Angular Random Walk of 0.23 deg/sqrt(Hz) and a bias instability of 1 deg/hr.
This plug-and-play satellite attitude determination solution has been engineered for maximum on orbit stability of your spacecraft, demanding low power in return. It utilises a RS422 interface with a request-based protocol for command and data handling, enabling seamless integration with your platform design, making it one of the most reliable and modular nanosatellite gyroscopes readily available on the market.
This compact, precision engineered gyroscope can be used for attitude determination in CubeSat and SmallSat across a range of applications from communications to earth observation. Not only is the PG400 gyroscopes design inherent of the design heritage of our reliable and fight proven iADCS solutions, but it is also compatible with iADCS 200 and 400 Attitude Determination & Control System.
The versatile iADCS200 solutions were designed for the CubeSat form factor with modularity in mind to fit various mission requirements. The iADCS400 is a fully autonomous attitude determination and control system aimed at small satellites with a 6U CubeSat form factor or larger. The iADCS series is equipped with magnetorquers and can be further upgraded with the RW210 series reaction wheels, one or more ST200 star trackers, external sun sensors, magnetometers, or a precision IMU.
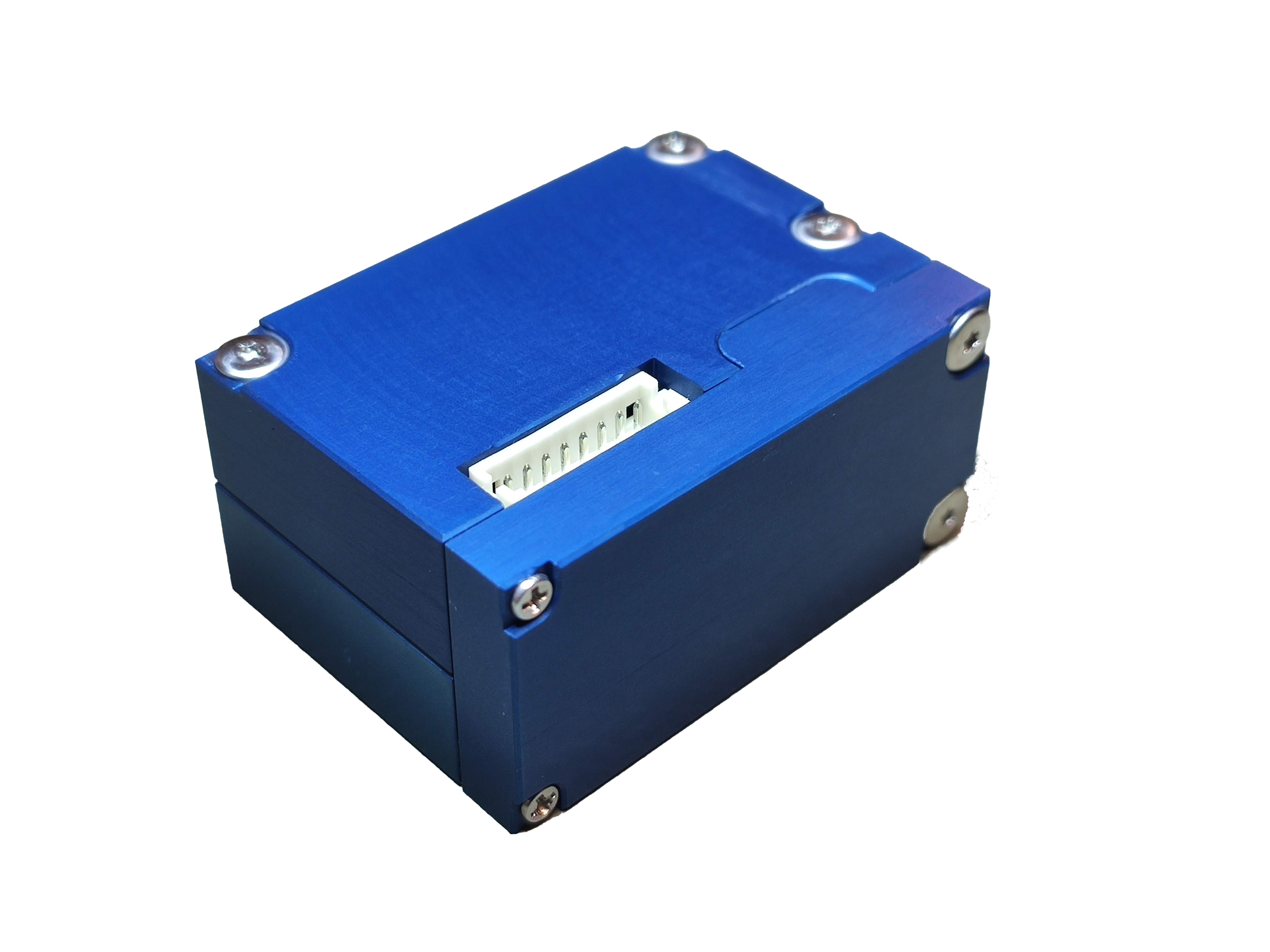
Compact
The solution is an impressive 30.8 x 25.7 x 17mm in size, its design is optimised for enhanced performance through its compact footprint.
Compatible
The PG400 makes use of a full duplex RS422 interface, speaking the unified AAC Hyperion Protocol also utilised on many of AAC Hyperion’s range of Attitude Determination and Control Products, simplifying the development of interface drivers.
Heritage
The PG400 gyroscope has successfully flown on orbit and it based on the design heritage of the internal IMU used in our reliable and flight proven attitude determination and control system iADCS solutions.
Why the PG400?
- TRL 9
- 16 Week Lead Time
- Flown Since 2023
- Power consumption of 280 mW
- Range of +/- 125 deg/s
- Rad tested up to 50 kRad TID
- Designed for 5 years in LEO
Technical Specifications
| Performance specifications | Min. | Typ. | Max. |
|---|---|---|---|
| Gyroscope Range (°/s) | -125 | ° | 125 |
| Zero rate offset (°/s) | -1 | 1 | |
| Offset temperature drift (°/s/°C) | 0.002 | 0.01 | |
| Offset short term bias stability (°/h) | 1 | ||
| Angular random walk (°/√h) | 0.23 | 0.3 |
| Variable | Min. | Typ. | Max. |
|---|---|---|---|
| Supply Voltage (V) | 3.65 | 5.0 | 5.5 |
| Supply Current (mA) | 75 | 100 | |
| RS422 input signal levels (V) | +/- 0.2 | +/- 5 | |
| RS422 Output signal levels (V) | +/- 3 | ||
| Operational temperature range (°C) | -40 | 20 | 85 |
Sign up to our newsletters for the latest news, projects and more delivered straight to your inbox
"*" indicates required fields